In sim descent algorithm demo tested on surrogate quadcopter
This project has been part of my club, Penn Aerial Robotics, ongoing challenge of Precision Payload Delivery and Retrieval for the SAE Aero Design Advanced Class. I led development and testing of the autonomy stack for two distinct Vertical Take-Off and Landing (VTOL) airframes: a Tiltrotor (Eclipse) and a Tailsitter (Zenith). The work emphasizes a data-driven software design and testing cycle to achieve technical readiness milestones: robust static payload tracking and flight-ready feedback controls tuning.
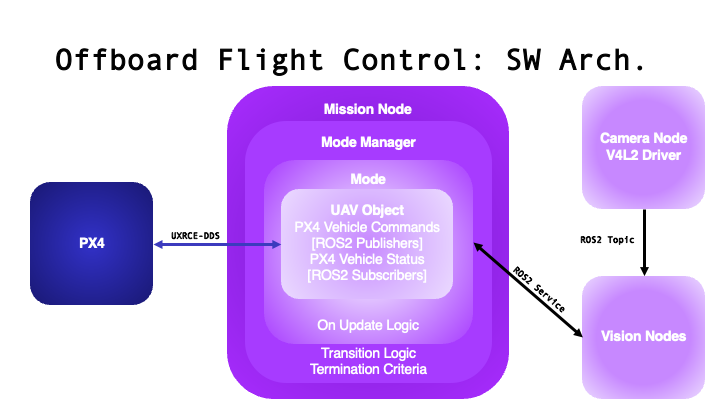
ROS2-PX4 communication pipeline including custom Kalman Filtering for payload tracking.
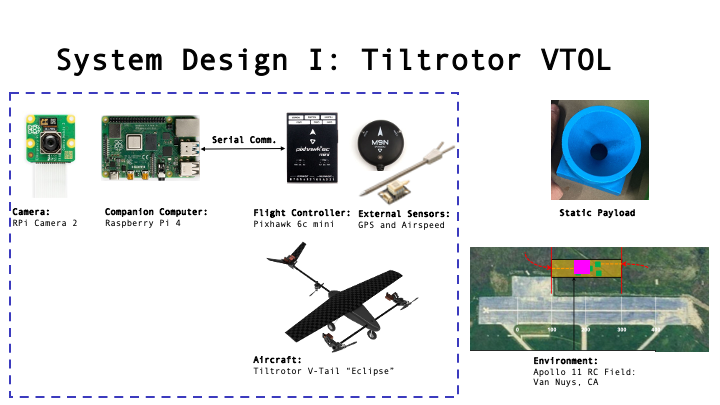
V-Tail Tiltrotor "Eclipse" hardware configuration.
The Problem: Raw computer-vision detection for the landing zone was too noisy for a stable PID control loop.
The Engineering Fix: I implemented a kalman filter that fuses the compute_3d_vector() function (converts pixel-space detections into a stable 3D vector in the drone frame using the pixel center of the payload, known altitude (depth), and the camera intrinsic matrix) with PX4's internal estimate of the vehicle state (from internal GPS/IMU/Baro sensor fusion).
In sim descent algorithm demo tested on surrogate quadcopter
The Zenith flying wing presented a unique control challenge: with no horizontal stabilizers, pitch and yaw authority are entirely dependent on propwash over the elevons. Initial flights (v1.2) showed significant instability under windy conditions. By analyzing the pitch rate response and servo outputs in PX4 logs, I identified that the actuator was saturating under external disturbances, causing loss of control authority. After suggest mechanical changes (increasing actuator deflection and reducing chord length), our new aircraft (v2.0) had instability when pitch commanded. By analyzing both the rate and angle response, I reduced the P-gain and increased D-term damping resulted in a stabilized low-overshoot step response.
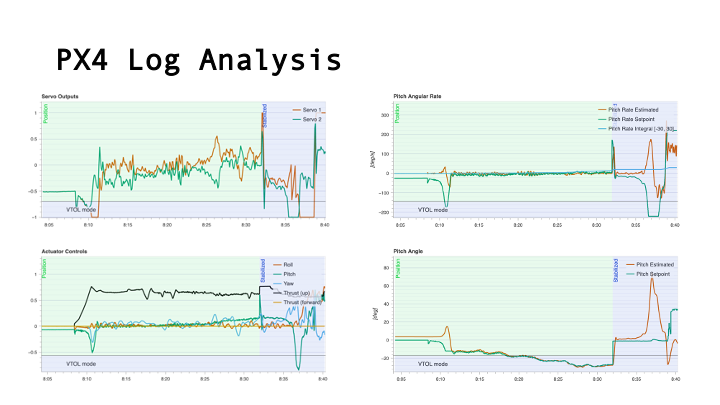
v1.2 Baseline: Actuator saturation in hover leading to minimal control authority during external disturbance event (wind gust).
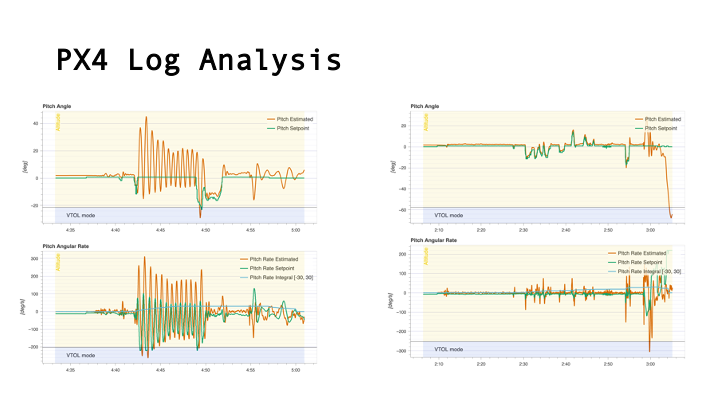
v2.0 Optimized: Form factor + mechanical changes led to untuned gains in aircraft (left). Response analysis + model-based tuning led to desirable pitch step-response (right).
Left: Quadcopter precision landing. Right: Eclipse tiltrotor vertical-to-hover transition.